This endeavour of coding and optimizing a self-balancing robot demands adeptness in signal analysis and interpretation using Matlab, alongside the capability to evaluate basic feedback systems to ensure stability. Drawing upon expertise in Python, a proportional-integral-differential controller was fine-tuned, empowering the robot to maintain equilibrium and promptly respond to external forces.
The PyBench Board
The self-balancing robot comprises a PyBoard, an accelerometer, a gyroscope, and a potentiometer to adjust the DC voltage supplied to the module, along with several other components.
The PyBench board can be utilized for various tasks unrelated to the self-balancing robot. This includes sinusoidal signal generation and spectrum analysis using Matlab and an external oscilloscope. Additionally, it was used to analyze the DC response of a non-linear system, understanding system modeling in the s-domain, and how to obtain the frequency response from the transfer function of a 'black-box' system, as well as discerning the difference between the measured and predicted frequency response of a bulb box.
 Figure 1. Writing Matlab code
Figure 1. Writing Matlab code
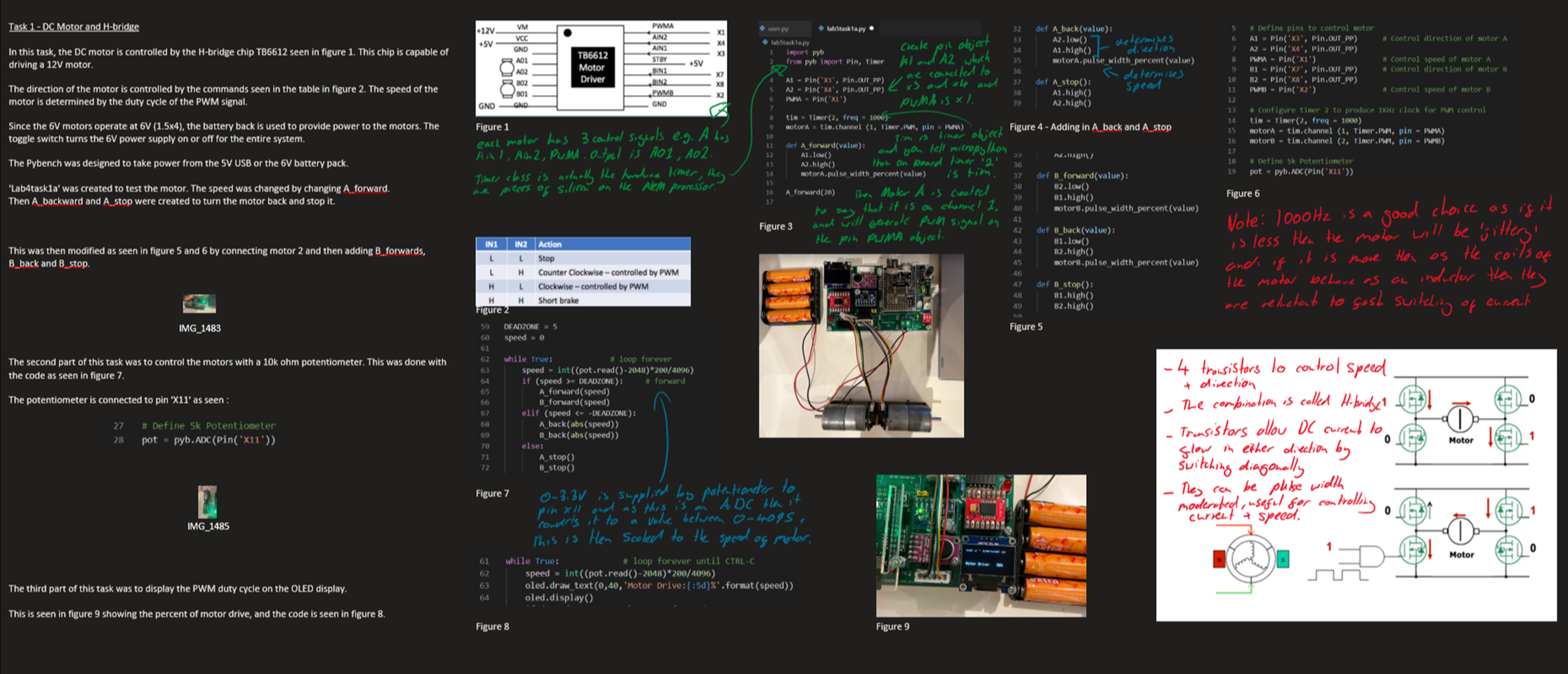 Figure 2. Logbook kept during the project
Figure 2. Logbook kept during the project



