Project Context
Spacebit is a British company focused on developing space robotics technology. They developed the Asagumo robot, a spider-like rover and plan to send it on a mission to the moon. For this mission our team designed a deployment system for the lunar rover once the launcher lands on the moon. This aims to safely lower the Asagumo down from a height of 0.8 meters onto the lunar surface. If the robot was to be deployed and free fall from this height, even with the moons lower gravity it could cause impact damage to the rover, as well as landing in an undesired orientation. For us simplicity is key, designing a low-cost lightweight and highly automated mechanism with one single trigger.
Deployment Box Design
From the initial deploy box conditions the team decided to use a trapdoor mechanism to open the bottom face of the deployer box. Then it was decided that the rover should slide down the ropes to slow down its descent. Inspired by a rappel rack, the rover was designed to slide around two cylinders as it fell. The simplicity of the total mechanism then meant the size of the deployer box could be decreased from 20 by 25 centimetres to 15.5 by 15 centimetres. The size of the box will also be the frame with a thermal MLI foil covering it instead of solid to reduce weight. This system will be triggered by a signal sent from the command centre to the lander when it lands on the moon. This will open the bottom face of the deployer box through a trapdoor mechanism controlled by two small motors, then gravity will cause the river to descend by sliding down four Kevlar ropes the ropes are 65 centimetres long and have a diameter of three millimetres so have a total mass of 25 grams. With a breaking strength of 300 newtons, it will be able to withstand the weight of the rover on the lunar surface.
 Figure 1. Render of the deployment mechanism close-up
Figure 1. Render of the deployment mechanism close-up
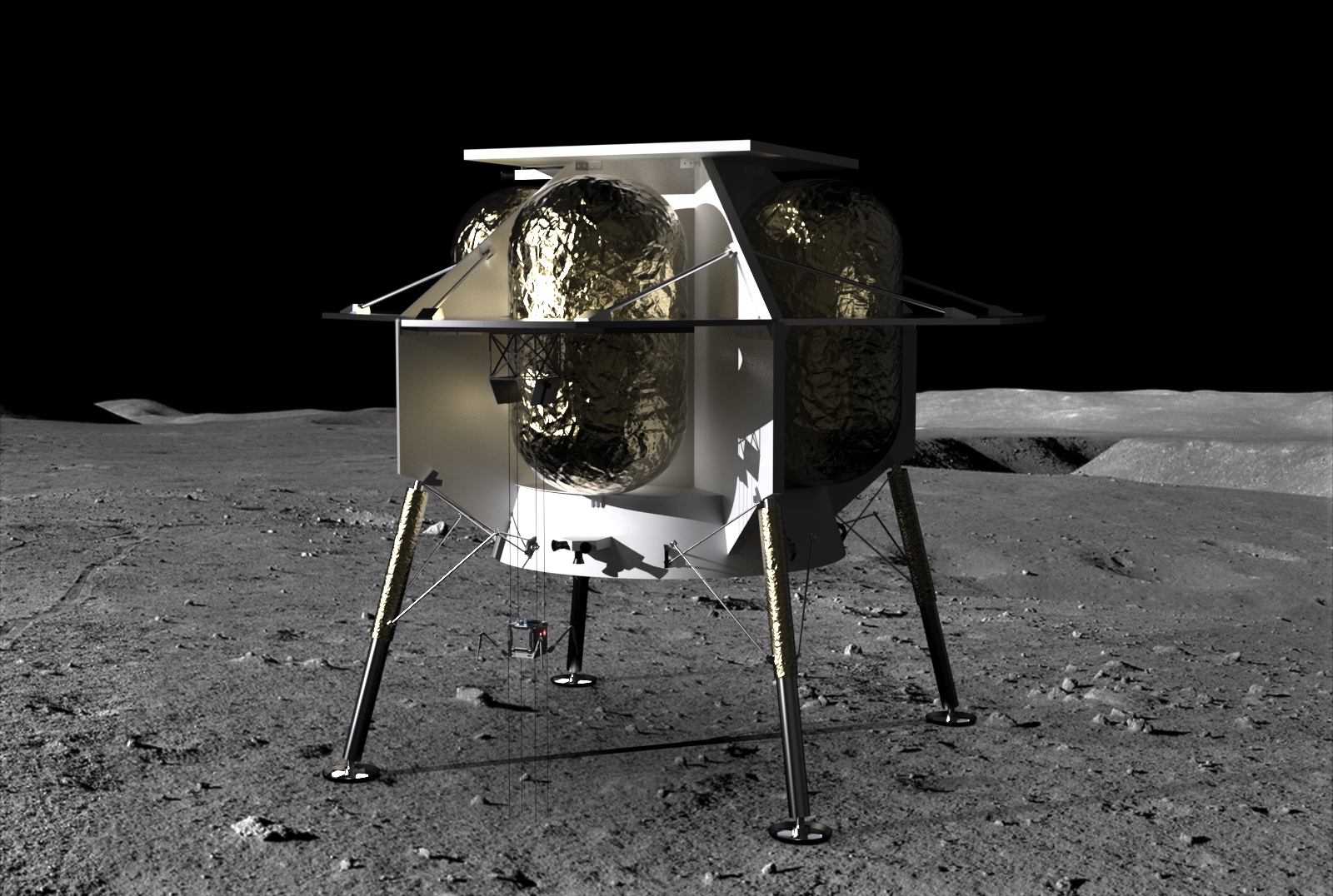 Figure 2. Render of the deployment mechanism on the lander
Figure 2. Render of the deployment mechanism on the lander



