Digital Testing
To demonstrate manufacturability, a detailed mould was created for the top part. These moulds would be injected with molten ABS. Once solidified, the 2-part mould would come apart with the part in-between. Draft analysis of the casing was carried out as this custom-formed ergonomic shape was likely to be hard to manufacture. The parting line was modified until the top and bottom lines had the correct drafts, satisfying the requirement of no parts with less than 0.5o angle.
The first FEA test simulated the force of the user's hand on the product, taken from real life measurements from users testing the prototype. The maximum von Misus stress recorded was 5x10^5 N/m2, although on closer analysis this was due to the inside the shell having a sharp edge where the fingers press down. This would be solved by filleting the inside of the shell to remove abrupt changes in material direction. The rest of the product has a stress below 3x10^5 N/m2. A safety factor of 2 was used for this FEA simulation.
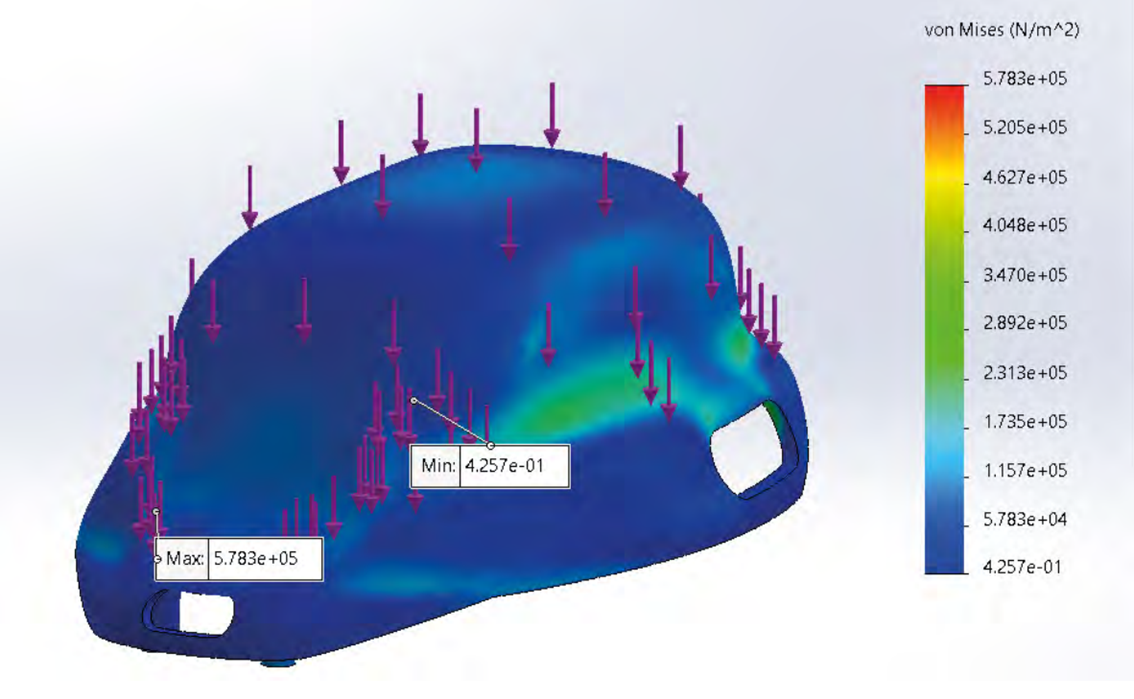 Figure 3. FEA digital testing of the product
Figure 3. FEA digital testing of the product
Another FEA test focused on the snap fit design securing the silicone strap to the upper ABS casing. The test was non-linear, including the snap fit component being moved 15mm, passing through the strap hole and the casing hole. From the test, it was evident that the thin 'prongs' on the snap fit were under the most stress, with maximum stress in the order of 10^8 N/m2. Testing revealed the need to refine the design to meet stress requirements. This would be done by extending the prong length and changing the shape of the top of the prongs that first come into the hole surfaces.
The mass is crucial for this product, needing to exert pressure on the surface while being lightweight for low dexterity users to move around. Multi sanders on the market range between 0.5kg and 1.5kg, with the Bosch PSM Prismo at 0.6kg as a reference. A mass less than 0.5kg would exert under 5N of force, insufficient for hard dirt removal. After selecting specific materials for components and working out individual masses, the total mass of the product was found to be 568g, ideal for usage. Additionally, the centre of mass was located in the centre of the product, providing better balance and control for the user.
Power Requirements
Vibration requirements for the surface-cleaning device are based on cordless random orbit sanders, which typically have an orbital stroke rate of 6000 to 10000 opm (orbits per minute). To ensure lower vibration levels, we aim for a lower bound value of 6000 opm. A motor with at least 12000 rpm no-load speed was required, equivalent to 2 times the orbital speed. We opt for a 12 V input voltage, standard for most cordless random orbit sanders and batteries. The chosen DC Motor meets these requirements: 21.2 W, 4.5-15 V, 13360 rpm, 3.18 mm Shaft Diameter.
The device's electronic circuit, including an indicator LED, will draw power primarily from the motor. Assuming a maximum continuous runtime of 30 minutes based on user surveys, we aim for the device to run for an hour continuously when fully charged, with a safety factor of 2.0. An 11.1V Lithium-Ion Rechargeable Battery Pack (2.6Ah) is selected for meeting voltage, capacity, and temperature suitability requirements for indoor domestic settings.
 Figure 4. Producting the CAD of the product
Figure 4. Producting the CAD of the product
Detailed Design: DFMA
A lip/groove was added to connect the two-part casing of the product, ensuring a secure join between walls. Mounting bosses, slightly filleted at the edges and drafted at 1.5 degrees, facilitated easy removal from the mold. An M4 thread forming screw was used to attach the two shells from the bottom, preserving the top shell's smooth aesthetic. Buttress ribbing was incorporated into the drafted battery supports, varying in height due to the shell's form, while mounting bosses for the master platform were filleted. Unidirectional ribs, exceeding three times the wall thickness, provided additional support, and ribbing on the mounting bosses for the capacitive touch sensor allowed for thinner walls and reduced material deformation post-molding.
The unique form of the product, with specially placed buttons and a charging port for improved dexterity, necessitated a layout where components wired to a PCB were spaced far apart. Consequently, many components, such as the LED cover, were directly fastened to the shell. The LED was affixed to the cover using resin adhesive, and then the opaque cover was slid into position and secured with M2 thread forming screws into the shell's mounting bosses.
The product will be assembled using a top-down approach, designed for easy assembly without specialist tools:
- Start by inserting the strap into the upper shell and securing it with snap fits.
- Insert and secure the charging port and touch sensor with screws.
- Press the three PVC rods into the master platform, then fasten the PCB with screws.
- Position the battery in the upper shell and secure it by screwing the master platform onto the shell.
- Place and fasten the red button by attaching the switch component behind it, secured to the green side mount board with M2 screws, which is fastened to the master board.
- Affix the motor to the plastic board with adhesive resin and attach the shaft.
- Screw the lower shell onto the upper shell, with the motor component and three flexible rods protruding.
- Finally, fasten the bottom attachment plate to the motor component with an annular snap fit, allowing rotation, and insert the rods into plate holes to maintain their position.
Manufacturing and Costs
The estimated total assembly time per product is 84 seconds. This duration is subject to variation based on the scale of manufacturing, whether assembly is fully automated, partially automated, or entirely manual. However, if multiplied by 1.5 as an upper bound, the maximum time can be assumed to be around 2 minutes. If a worker is compensated at a rate of $7 per hour, then the unit cost for assembly amounts to $0.23. This represents a relatively low cost in comparison to the anticipated selling price of the product.
The determination of component costs involved a comprehensive approach. Purchased components were priced based on the manufacturer's listed rates, while the costs of manufactured parts were derived from various sources. Solidworks costing tool was utilized for certain components, where knowledge of manufacturing methods and materials enabled automatic calculation of unit costs. Other online resources were employed for more intricate or multi-material parts. These cost estimates were predicated on a production scale of 100,000 units.
It's important to acknowledge that these cost projections are contingent upon several factors. Production volume, whether 10,000 or 1,000,000 units, will significantly influence unit costs. Additionally, considerations must be given to manufacturing efficiency and fixed expenses. Given the alignment of this product within Bosch's product line, leveraging their streamlined production capabilities should facilitate further cost reductions, particularly since some components utilized in this product, such as LEDs and screws, are also employed by Bosch. Through economies of scale, we anticipate that the current unit cost of £34.06 will decrease, especially with regard to expensive components like the motor and battery. Our target selling price of £30 aligns with Bosch's pricing strategy for similar products, and a halving of the unit cost would render this price point feasible.
 Figure 5. The product alongside its scrubbing attachments
Figure 5. The product alongside its scrubbing attachments
Built for Sustainability
The product was designed so that the user could replace or recycle many parts at its end of life. As the assembly method is simple and the common fastening method is snap fits or screws in mounting bosses, it means that disassembly is also easy and can be done by the user. Removal of the bottom shell allows the user to take apart other parts with a screwdriver. The exception is the snap-fit part connecting the strap to the upper shell, but if this breaks, it can be removed and a new one can simply be snapped back in to replace it. For recycling, all plastic parts, as seen on the parts list, are made from ABS or PVC, which, as indicated in the table, can be recycled and blended. Screws and other metal components can also be recycled as they are made out of steel or aluminium. The only components that most likely would go to landfill are the charging port, the LED bonded by adhesive to the cover, the PCB, and the motor.
 Figure 1. Product render, showing its handle to help with grip and large power button
Figure 1. Product render, showing its handle to help with grip and large power button
 Figure 2. Exploded view
Figure 2. Exploded view



