Remote-controlled cars hold a central place in many people's childhoods. However, most of them come with basic features such as lights or sounds in addition to their driving capabilities. The challenge of this project was to create a more interactive RC car by integrating parking sensors, LED lights, and a garage entry timing game. It showcases the integration of RFID, ultrasound, servo motors, and Arduino electronics.
The Challenge
The overarching challenge was to create a 'human in the loop' physical computing product. Constraints included using Arduino as the microcontroller and making the majority of the product from cardboard.
"Human in the loop" in the context of a consumer products refers to a system where a person is actively involved in controlling or supervising the operation of the toy. Essentially, it means that human input is necessary for the product to function or perform certain tasks. The person is "in the loop" because their actions directly influence the behaviour of the product.
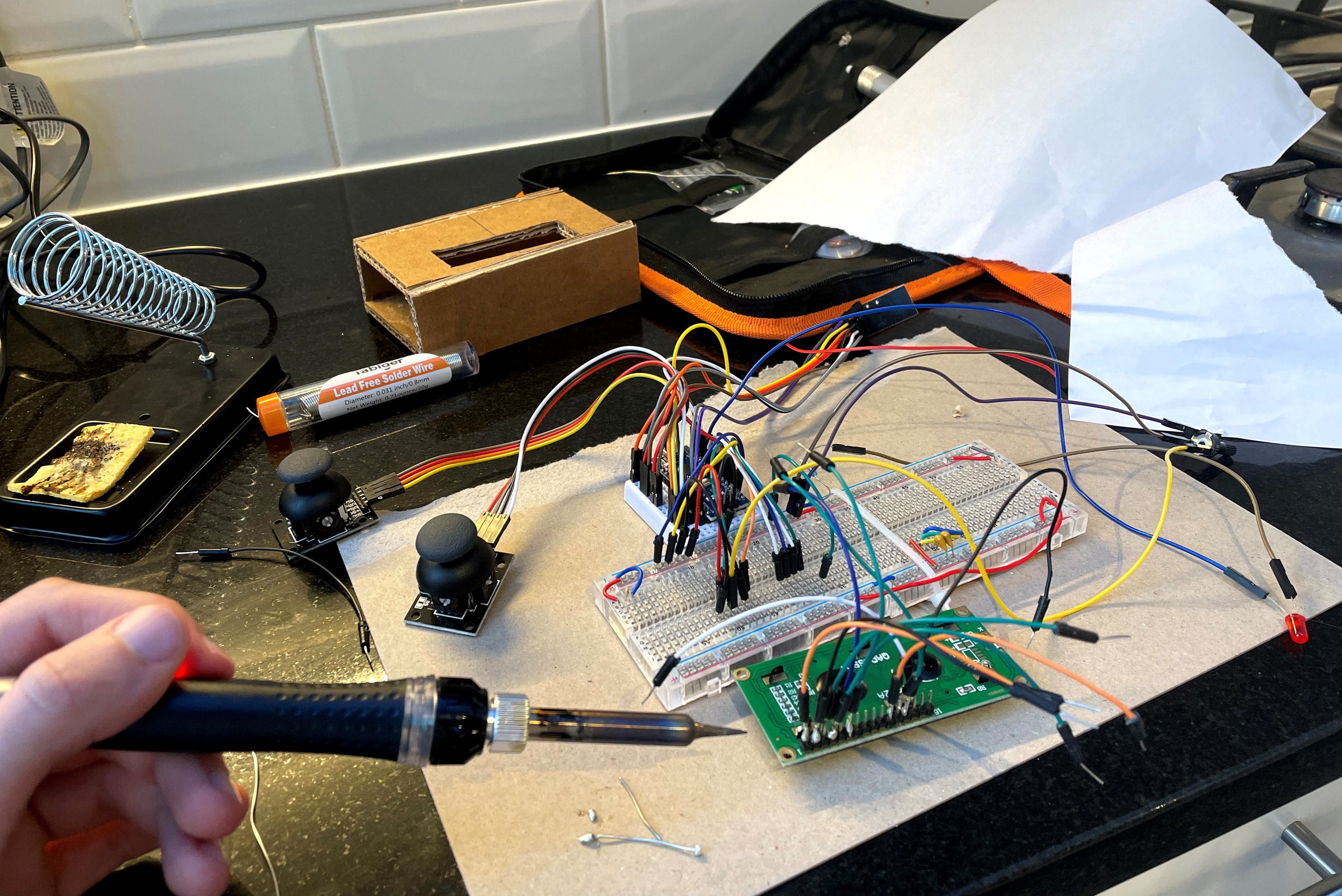 Figure 1. Prototyping the product
Figure 1. Prototyping the product



